












產品詳情
智能行星變速機AT210-FL-350-S1品悅世界
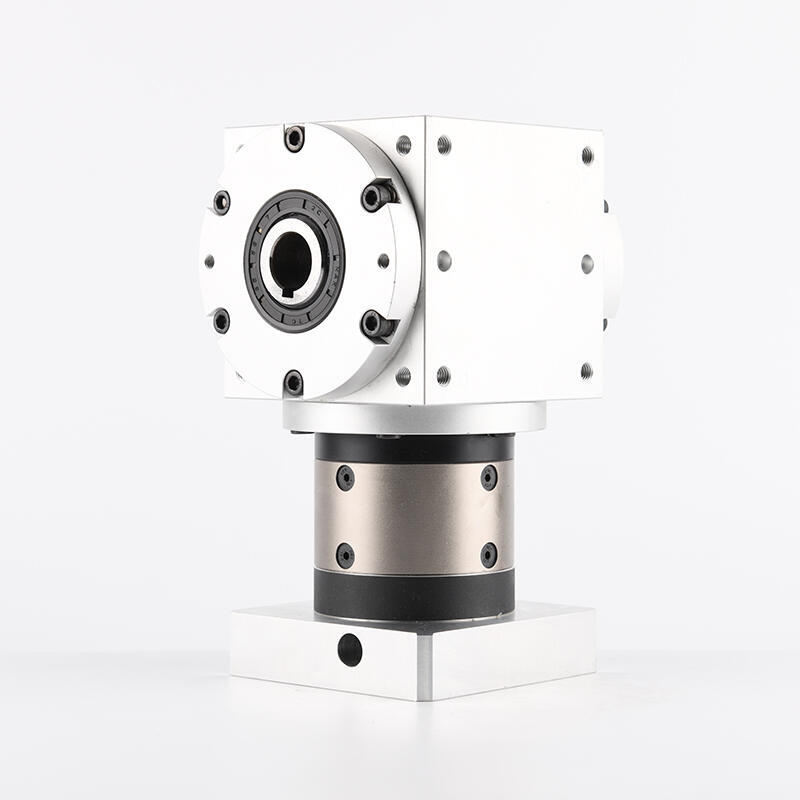
EAMON/伊明牌HAR系列直角行星減速機
規格:直角型
減速機型:HA(平行斜齒精密型)
減速機體型:R(90°直角輸出)
框號:47、64、90、100、140、200、255
減速比:單段4-20;雙段20-200
出力軸鍵槽:S(標準品)、T(特殊)
背隙等級:單段:P0≤1,P1≤3,P2≤5;雙段:P0≤3,P1≤5,P2≤7
峰值轉矩:14NM-2000NM
智能行星變速機AT210-FL-350-S1品悅世界
VRB-090-3-S3-19DB19
VRB-090-4-S3-19DB19
VRB-090-5-S3-19DB19
VRB-090-6-S3-19DB19
VRB-090-7-S3-19DB19
VRB-090-8-S3-19DB19
VRB-090-9-S3-19DB19
VRB-090-10-S3-19DB19
VRB-090-15-S3-19DB19
VRB-090-16-S3-19DB19
VRB-090-20-S3-19DB19
VRB-090-25-S3-19DB19
VRB-090-28-S3-19DB19
VRB-090-30-S3-19DB19
VRB-090-35-S3-19DB19
VRB-090-40-S3-19DB19
VRB-090-45-S3-19DB19
VRB-090-50-S3-19DB19
VRB-090-60-S3-19DB19
VRB-090-70-S3-19DB19
VRB-090-80-S3-19DB19
VRB-090-90-S3-19DB19
VRB-090-100-S3-19DB19
VRB-090-3-S3-14BL14
VRB-090-4-S3-14BL14
VRB-090-5-S3-14BL14
VRB-090-6-S3-14BL14
VRB-090-7-S3-14BL14
VRB-090-8-S3-14BL14
VRB-090-9-S3-14BL14
VRB-090-10-S3-14BL14
VRB-090-15-S3-14BL14
VRB-090-16-S3-14BL14
VRB-090-20-S3-14BL14
VRB-090-25-S3-14BL14
VRB-090-28-S3-14BL14
VRB-090-30-S3-14BL14
VRB-090-35-S3-14BL14
VRB-090-40-S3-14BL14
VRB-090-45-S3-14BL14
VRB-090-50-S3-14BL14
VRB-090-60-S3-14BL14
VRB-090-70-S3-14BL14
VRB-090-80-S3-14BL14
VRB-090-90-S3-14BL14
VRB-090-100-S3-14BL14
智能行星變速機AT210-FL-350-S1品悅世界

精密伺服減速機在激光打標機設備上實現高精度定位主要依賴于以下幾個方面的技術和方法:
高精度編碼器:伺服減速機通常配備高精度編碼器,能夠實時監測電機的旋轉角度和位置。編碼器的高分辨率和高精度是實現高精度定位的關鍵。
伺服控制系統:伺服控制系統通過對電機電流、速度和位置的精確控制,實現電機的精確運動。系統采用先進的控制算法,如PID控制、前饋控制等,能夠減小誤差、提高響應速度,從而實現高精度定位。
高剛度機械結構:伺服減速機需要具備高剛度的機械結構,以確保在承受負載和外部干擾時仍能保持精確的位置。通過優化結構設計和選用高質量的材料,可以提高機械結構的剛度,減小變形和振動,從而保證定位精度。
高精度傳動系統:伺服減速機的傳動系統需要具備高精度和高穩定性。通過選用高精度齒輪、軸承等傳動元件,以及優化傳動系統的設計和制造工藝,可以減小傳動誤差,提高傳動精度。
精密調整和校準:在設備安裝和使用過程中,需要進行精密調整和校準,以消除各種誤差源對定位精度的影響。包括機械結構的校準、傳動系統的校準、控制系統的參數調整等。
環境因素控制:伺服減速機的工作環境對其定位精度有一定影響。需要控制環境溫度、濕度、電磁干擾等因素,以確保減速機的性能和穩定性。
高素質的操作和維護人員:操作和維護人員的素質對設備的定位精度也有一定影響。需要具備較高的技術水平和實踐經驗,能夠正確操作設備、及時處理故障、進行定期維護和保養。
通過以上技術和方法的綜合應用,精密伺服減速機可以在激光打標機設備上實現高精度定位,滿足各種精密打標的需求。

智能行星變速機AT210-FL-350-S1品悅世界
EAMON/伊明牌HAR系列直角行星減速機
規格:直角型
減速機型:HA(平行斜齒精密型)
減速機體型:R(90°直角輸出)
框號:47、64、90、100、140、200、255
減速比:單段4-20;雙段20-200
出力軸鍵槽:S(標準品)、T(特殊)
背隙等級:單段:P0≤1,P1≤3,P2≤5;雙段:P0≤3,P1≤5,P2≤7
峰值轉矩:14NM-2000NM
智能行星變速機AT210-FL-350-S1品悅世界
VRB-090-3-S3-19DB19
VRB-090-4-S3-19DB19
VRB-090-5-S3-19DB19
VRB-090-6-S3-19DB19
VRB-090-7-S3-19DB19
VRB-090-8-S3-19DB19
VRB-090-9-S3-19DB19
VRB-090-10-S3-19DB19
VRB-090-15-S3-19DB19
VRB-090-16-S3-19DB19
VRB-090-20-S3-19DB19
VRB-090-25-S3-19DB19
VRB-090-28-S3-19DB19
VRB-090-30-S3-19DB19
VRB-090-35-S3-19DB19
VRB-090-40-S3-19DB19
VRB-090-45-S3-19DB19
VRB-090-50-S3-19DB19
VRB-090-60-S3-19DB19
VRB-090-70-S3-19DB19
VRB-090-80-S3-19DB19
VRB-090-90-S3-19DB19
VRB-090-100-S3-19DB19
VRB-090-3-S3-14BL14
VRB-090-4-S3-14BL14
VRB-090-5-S3-14BL14
VRB-090-6-S3-14BL14
VRB-090-7-S3-14BL14
VRB-090-8-S3-14BL14
VRB-090-9-S3-14BL14
VRB-090-10-S3-14BL14
VRB-090-15-S3-14BL14
VRB-090-16-S3-14BL14
VRB-090-20-S3-14BL14
VRB-090-25-S3-14BL14
VRB-090-28-S3-14BL14
VRB-090-30-S3-14BL14
VRB-090-35-S3-14BL14
VRB-090-40-S3-14BL14
VRB-090-45-S3-14BL14
VRB-090-50-S3-14BL14
VRB-090-60-S3-14BL14
VRB-090-70-S3-14BL14
VRB-090-80-S3-14BL14
VRB-090-90-S3-14BL14
VRB-090-100-S3-14BL14
智能行星變速機AT210-FL-350-S1品悅世界
精密伺服減速機在激光打標機設備上實現高精度定位主要依賴于以下幾個方面的技術和方法:
高精度編碼器:伺服減速機通常配備高精度編碼器,能夠實時監測電機的旋轉角度和位置。編碼器的高分辨率和高精度是實現高精度定位的關鍵。
伺服控制系統:伺服控制系統通過對電機電流、速度和位置的精確控制,實現電機的精確運動。系統采用先進的控制算法,如PID控制、前饋控制等,能夠減小誤差、提高響應速度,從而實現高精度定位。
高剛度機械結構:伺服減速機需要具備高剛度的機械結構,以確保在承受負載和外部干擾時仍能保持精確的位置。通過優化結構設計和選用高質量的材料,可以提高機械結構的剛度,減小變形和振動,從而保證定位精度。
高精度傳動系統:伺服減速機的傳動系統需要具備高精度和高穩定性。通過選用高精度齒輪、軸承等傳動元件,以及優化傳動系統的設計和制造工藝,可以減小傳動誤差,提高傳動精度。
精密調整和校準:在設備安裝和使用過程中,需要進行精密調整和校準,以消除各種誤差源對定位精度的影響。包括機械結構的校準、傳動系統的校準、控制系統的參數調整等。
環境因素控制:伺服減速機的工作環境對其定位精度有一定影響。需要控制環境溫度、濕度、電磁干擾等因素,以確保減速機的性能和穩定性。
高素質的操作和維護人員:操作和維護人員的素質對設備的定位精度也有一定影響。需要具備較高的技術水平和實踐經驗,能夠正確操作設備、及時處理故障、進行定期維護和保養。
通過以上技術和方法的綜合應用,精密伺服減速機可以在激光打標機設備上實現高精度定位,滿足各種精密打標的需求。
智能行星變速機AT210-FL-350-S1品悅世界
